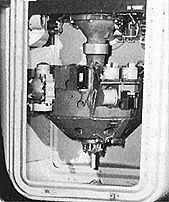

| 1) the binnacle - which contains the stable platform, gyros and accelerometers. | |
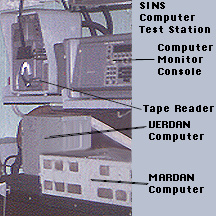
| 2) the SINS console which contains the servo electronics to keep the stable platform level, and oriented correctly. | |
| 3) the navigation computer - which integrates the various inputs from all of the components and generates orientation data, tracks and follows earth rotation, ship's motions, and integrates acceleration into speed data; speed into distance; and distance and direction into latitudinal and longitudinal coordinates - plus - roll, pitch and heading data which are fed to various other systems throughout the boat (navigation, fire control, missile guidance data, etc.). The computer is actually in the bottom drawer of the console. | |
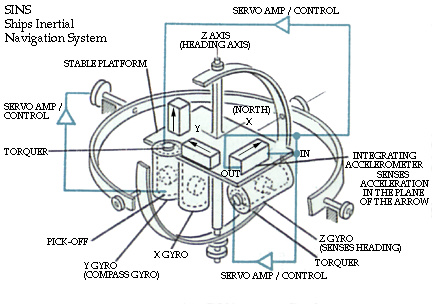 The platforms can be erected, leveled, and calibrated with the boat at sea - however - since this complicates the "basic" operation - for the purpose of this explanation - we're only going to talk about doing this while tied to the tender - i.e. dead still. The stable platform is called "stable" because it is kept level - and referenced to true (not magnetic) north. It can be kept this way by taking advantage of several natural laws of physics.
The platforms can be erected, leveled, and calibrated with the boat at sea - however - since this complicates the "basic" operation - for the purpose of this explanation - we're only going to talk about doing this while tied to the tender - i.e. dead still. The stable platform is called "stable" because it is kept level - and referenced to true (not magnetic) north. It can be kept this way by taking advantage of several natural laws of physics.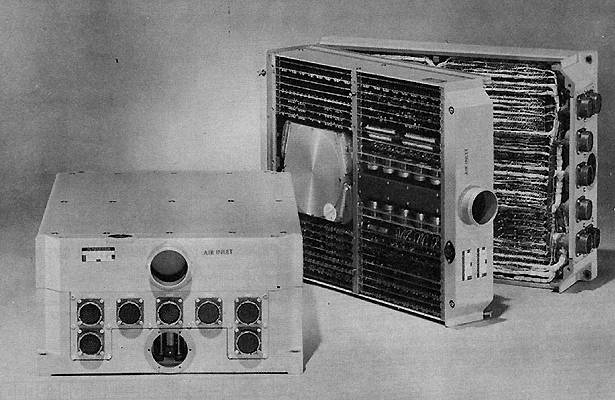 |
| Verdan - complete computer on left - opened for service on the right. Notice the power supply - with it's transformer and huge transistors right by the air intake-- the rotating magnetic memory (which is not only the permanent memory - but the working registers as well!) is to the left of the power supply. Photos courtesy Autonetics. Data from the Ballistic Research Laboratories Survey of Domestic computers - BRL 1961 and BRL 1964. |
 |
| Mardan - The control panel attaches to the front - making a more compact installation - considering it's roughly twice the power of Verdan. |
| Verdan | Mardan (Verdan II) | |
| Internal number system | Binary | Binary |
| Binary digits/word | 24 | 27 |
| Binary digits/instruction | 22 | 24 |
| Instructions/word | 1 | 1 |
| Instructions decoded | 52 | |
| Arithmetic system | Fixed Point | Fixed point |
| Instruction type | One and 112 address format | Operand sector & channel + next instruction sector |
| Number range | As Integer:-(223 <= W < (2 23 -1) As Fraction:- 1 <= W < 1 - 2 -23 | ± 8,388,607 (Fractional) |
| 0 1 | 2 8 | 9 12 | 13 16 | 17 23 |
| Not Used | Sector of Next Instruction | Operation Code | Channel | Sector |
| Operand Address | ||||
| 24 22 | 21 16 | 15 11 | 10 1 |
| operand address | next instruction | operation code | operand address channel sector |
| Operation | Including Storage Access | Excluding Storage Access | Including Storage Access |
| | | | |
| Add | | | |
| Mult | | | |
| Div | | |
| Arithmetic mode | Serial | |
| Timing | Synchronous | |
| Operation | Sequential |
| Medium | No. of Words | No. of Bin Digits/Word | Access Microseconds | |
| Verdan | Magnetic Disk | | | |
| Mardan | Magnetic Disk | | | |
| | | ||||
| Media | Number | | | Speed | Remarks |
| Discrete | (none) | | Variable1,000 pulses/sec max. | (Read under GP program control) | |
| Resolver | 3 Incremental (using 9 integrators) | | Variable 1,000 cycles/sec max. | (DDA program control) | |
| Pulse | 3 Ternary coded pulse (using 8 integrators) | | 100 pulses/sec | (DDA program control) | |
| Analog | 16 Inputs +/- 0.5% Range +/- 10V | | Continuous | (DDA program control) | |
| Encoder | 32 Inputs 20 significant bits | | Continuous | (DDA program control) | |
| | | ||||||
| Medium | # | Speed | Remarks | # | Speed | Remarks | |
| GP channel & timing | 345,600 cycles | Continuous | |||||
| Discrete | | 100 pulses | Control external devices | ||||
| Incremental (Binary) | 4 | 100 times/sec | 100 pulses | DDA information) | |||
| Incremental (Ternary) | 4 | 100 times/sec | 100 pulses | DDA information) | |||
| Analog | 15 | 100 times/sec | +/- 0.5% Range +/- 10VDC | Continuous | Two format options, 20-bit precision. | ||
| Shaft Positioning | 16 | 100 times/sec | 20 significant bits | Continuous | |||
| Serial Digital | 1 | 332.8 Bits | |||||
| Type | Quantity |
| Diodes | 10,000 |
| Transistors | 1,500 |
| Capacitors | 670 |
| Resistors | 4,500 |
| Verdan | Mardan | |
| Power 400cycle 3Phase | 0.320Kw 0.8pf | 0.925Kw. |
| Volume | 1.4 cu. ft. | 3.0 cu. ft. |
| Weight | 82 lbs. | 180 lbs |
| | | |
| Number produced to date | | |
| Number in current operation | | |
| Number in current production | | |
| Number on order | | |
| Anticipated production rates | | |
| Time required for delivery | | |